Além de significar uma evolução para a robótica, o projeto revelou detalhes sobre a habilidade motora do animal
Roberta Machado
Estado de Minas: 17/10/2014 07:01
Para desenvolver um
robô capaz de subir um instável terreno arenoso, pesquisadores se
inspiraram em um bicho sem pernas. A pesquisa, publicada na edição mais
recente da revista Science, descreve como os cientistas conseguiram
reproduzir em uma máquina articulada a habilidade da cascavel-chifruda
de se arrastar morro acima. O trabalho acabou revelando detalhes do
comportamento do réptil que nem mesmo os estudiosos da natureza sabiam
descrever, provando que a robótica bioinspirada pode ajudar a ciência a
entender melhor o mundo animal.
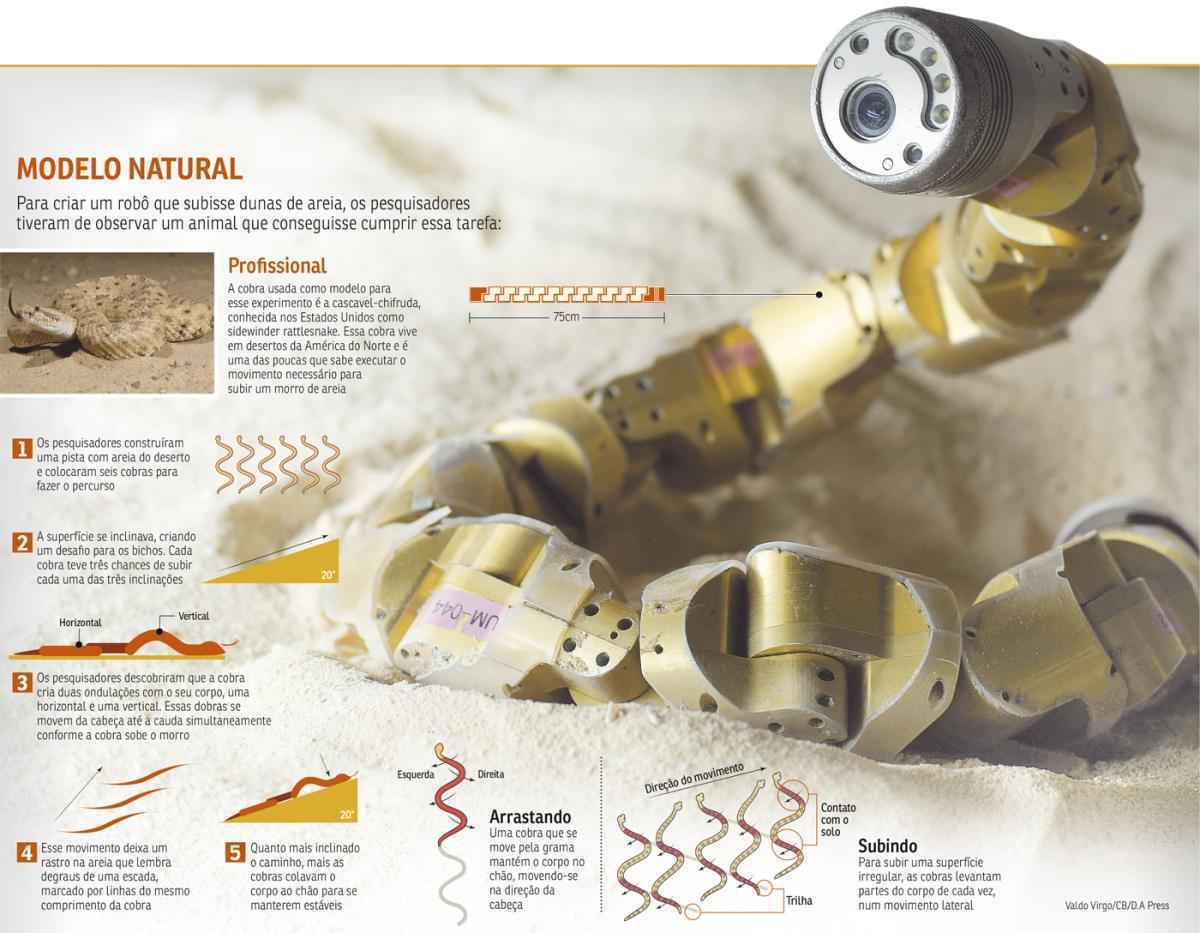
Para desvendar o mistério das cobras que escalam dunas, os pesquisadores foram a um zoológico e pegaram emprestados seis desses bichos. Eles criaram uma ladeira com areia trazida do Deserto de Yuma, do Arizona, e colocaram os animais para atravessar o caminho inclinado. Cada cobra tinha três chances de subir pela superfície, e então o equipamento era inclinado mais uma vez para tornar a tarefa ainda mais difícil. Todo o processo foi observado e registrado em vídeo.
 |
Para desvendar o mistério das cobras que escalam dunas, os pesquisadores foram a um zoológico e pegaram emprestados seis desses bichos. Eles criaram uma ladeira com areia trazida do Deserto de Yuma, do Arizona, e colocaram os animais para atravessar o caminho inclinado. Cada cobra tinha três chances de subir pela superfície, e então o equipamento era inclinado mais uma vez para tornar a tarefa ainda mais difícil. Todo o processo foi observado e registrado em vídeo.
As imagens mostraram que a cobra tem uma técnica muito particular para
se arrastar pela areia, chamada sidewinding. Com ela, o animal vence o
obstáculo quase de lado, levantando um segmento do corpo por vez.
Primeiro, ele levanta a cabeça, e depois, desloca essa curva até a
cauda, transferindo toda a estrutura para uma área mais alta do morro. É
como se a cobra subisse uma escada, deixando na areia rastros que
lembram degraus.
ADAPTAÇÃO Quanto mais inclinado o morro, maior é a parte do corpo que o bicho mantém firme na superfície. A técnica evita que o animal afunde ou role para baixo, como acontecia com a primeira versão do robô segmentado criado pelos pesquisadores. Outros tipos de cobras falharam no desafio, mostrando que poucas espécies são capazes de realizar a complicada manobra. Isso indica uma nova hipótese para a ciência: de que o controle neuromotor desse tipo específico de cascavel evoluiu de forma diferente e adquiriu controle muscular que a permite se locomover por terrenos difíceis.
Para as máquinas, contudo, a evolução não é um processo que leva milhões de anos. Robôs podem adquirir novas habilidades rapidamente e, assim que os pesquisadores compreenderam o sistema usado pelas cascavéis, implantaram a mesma dinâmica no robô cobra, que agora também consegue sair de um chão liso para subir dunas de areia. “Adaptabilidade é muito importante para uma boa navegação em ambientes desafiadores. O nosso robô cobra pode usar seus sensores para analisar o ambiente e ajustar os movimentos”, conta Chaohui Gong, aluno de doutorado da Universidade Carnegie Mellon e um dos autores do trabalho.
A pesquisa pode ser aplicada, de acordo com os pesquisadores, em máquinas especializadas no reconhecimento de terrenos de difícil acesso. Um robô cobra poderia, por exemplo, explorar uma mina desmoronada em busca de sobreviventes, ou fazer buscas arqueológicas. Na verdade, a máquina que deu início a esse experimento tinha exatamente esse trabalho. Elizabeth, como é chamada a máquina, falhou em analisar o interior de uma pirâmide cheia de areia. Agora, os pesquisadores esperam que ela possa cumprir a tarefa.
DIFICULDADES Há algum tempo que engenheiros voltam os olhos para a natureza em busca de soluções inteligentes para seus projetos. Robôs podem se sair muito bem na segurança do laboratório, mas o mundo real apresenta desafios que nem sempre podem ser vencidos por máquinas tradicionais. “Entender ambientes estruturados como um piso plano, escadas ou uma estrada é muito mais simples do que terrenos complexos, com areia, grama, lama ou cascalho”, afirma Auke Jan Ijspeert, professor do Laboratório de Biorrobótica da Escola Politécnica Federal de Lausana, na Suíça.
“Normalmente, a locomoção ao ar livre é muito complexa, porque o movimento do robô afeta não apenas o robô, mas também o meio ambiente. Por exemplo, no movimento da água, areia ou lama. E a física dessas interações pode ser muito complexa”, ressalta Ijspeert. Para isso, pesquisadores precisam observar os animais no seu hábitat natural — ou em um cenário muito próximo a isso — e usar ferramentas como sensores no ambiente e no animal para descrever com precisão matemática o movimento que eles fazem instintivamente.
Especialistas ressaltam, contudo, que compreender os animais não é suficiente: nem sempre é possível reproduzir os incríveis talentos dos bichos em sistemas artificiais. “Não temos a combinação correta de materiais para a estrutura e a energia, nem os sistemas de controle para que mantenham o equilíbrio e façam manobras”, ressalta Jake Socha, especialista em engenharia bioinspirada e pesquisador do Instituto Politécnico e Universidade Estadual da Virgínia (Virgina Tech), nos EUA. Muitas tentativas, como robôs inspirados em insetos, ainda não passam de imitações grosseiras dos seus modelos. “O fato de que uma cobra como essa pudesse ser replicada em um robô com tanta fidelidade é realmente impressionante”, avalia Socha.
ADAPTAÇÃO Quanto mais inclinado o morro, maior é a parte do corpo que o bicho mantém firme na superfície. A técnica evita que o animal afunde ou role para baixo, como acontecia com a primeira versão do robô segmentado criado pelos pesquisadores. Outros tipos de cobras falharam no desafio, mostrando que poucas espécies são capazes de realizar a complicada manobra. Isso indica uma nova hipótese para a ciência: de que o controle neuromotor desse tipo específico de cascavel evoluiu de forma diferente e adquiriu controle muscular que a permite se locomover por terrenos difíceis.
Para as máquinas, contudo, a evolução não é um processo que leva milhões de anos. Robôs podem adquirir novas habilidades rapidamente e, assim que os pesquisadores compreenderam o sistema usado pelas cascavéis, implantaram a mesma dinâmica no robô cobra, que agora também consegue sair de um chão liso para subir dunas de areia. “Adaptabilidade é muito importante para uma boa navegação em ambientes desafiadores. O nosso robô cobra pode usar seus sensores para analisar o ambiente e ajustar os movimentos”, conta Chaohui Gong, aluno de doutorado da Universidade Carnegie Mellon e um dos autores do trabalho.
A pesquisa pode ser aplicada, de acordo com os pesquisadores, em máquinas especializadas no reconhecimento de terrenos de difícil acesso. Um robô cobra poderia, por exemplo, explorar uma mina desmoronada em busca de sobreviventes, ou fazer buscas arqueológicas. Na verdade, a máquina que deu início a esse experimento tinha exatamente esse trabalho. Elizabeth, como é chamada a máquina, falhou em analisar o interior de uma pirâmide cheia de areia. Agora, os pesquisadores esperam que ela possa cumprir a tarefa.
DIFICULDADES Há algum tempo que engenheiros voltam os olhos para a natureza em busca de soluções inteligentes para seus projetos. Robôs podem se sair muito bem na segurança do laboratório, mas o mundo real apresenta desafios que nem sempre podem ser vencidos por máquinas tradicionais. “Entender ambientes estruturados como um piso plano, escadas ou uma estrada é muito mais simples do que terrenos complexos, com areia, grama, lama ou cascalho”, afirma Auke Jan Ijspeert, professor do Laboratório de Biorrobótica da Escola Politécnica Federal de Lausana, na Suíça.
“Normalmente, a locomoção ao ar livre é muito complexa, porque o movimento do robô afeta não apenas o robô, mas também o meio ambiente. Por exemplo, no movimento da água, areia ou lama. E a física dessas interações pode ser muito complexa”, ressalta Ijspeert. Para isso, pesquisadores precisam observar os animais no seu hábitat natural — ou em um cenário muito próximo a isso — e usar ferramentas como sensores no ambiente e no animal para descrever com precisão matemática o movimento que eles fazem instintivamente.
Especialistas ressaltam, contudo, que compreender os animais não é suficiente: nem sempre é possível reproduzir os incríveis talentos dos bichos em sistemas artificiais. “Não temos a combinação correta de materiais para a estrutura e a energia, nem os sistemas de controle para que mantenham o equilíbrio e façam manobras”, ressalta Jake Socha, especialista em engenharia bioinspirada e pesquisador do Instituto Politécnico e Universidade Estadual da Virgínia (Virgina Tech), nos EUA. Muitas tentativas, como robôs inspirados em insetos, ainda não passam de imitações grosseiras dos seus modelos. “O fato de que uma cobra como essa pudesse ser replicada em um robô com tanta fidelidade é realmente impressionante”, avalia Socha.
Nenhum comentário:
Postar um comentário